
1 引言
三相PWM整流器具有直流電壓可控、功率因數高、網側電流畸變小等優點,廣泛應用于新能源發電、電動汽車充放電站等領域。目前常用的三相整流器控制策略有基于d,q旋轉坐標系的直(間)接電流PI控制,基于反饋線性化的三相PWM控制法,三相PWM整流器的H∞魯棒控制等。其中,基于d,q旋轉坐標系的直接電流PI控制結構清晰、實現簡單,響應速度快,且設計步驟可參考傳統的PI設計經驗,得到了廣泛應用。直接電流PI控制應用于三相整流器時,會在啟動時導致較大的沖擊電流,增加了功率器件的電流應力,對器件選型及工作可靠性產生了很大影響。
針對三相PWM整流器的啟動沖擊問題,這里介紹了啟動瞬間PI控制器的調節過程,建立了系統的動態模型,在此基礎上給出了沖擊電流峰值的計算公式,指出了產生啟動沖擊的原因和影響因素,分析了PI參數對沖擊電流大小的影響,并提出了一種新型軟啟動算法,通過仿真和實驗驗證了理論分析的可行性。
2 三相PWM整流器控制與建模
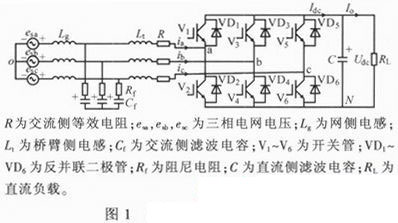
三相PWM整流器的主電路拓撲為三相半橋電壓源型變換器(VSC),如圖1所示,主要由LCL濾波器、三相橋臂及直流側電容組成。
忽略R,經d,q坐標變換,系統狀態方程為:
Ldid/dt=ud-ed, Ldiq/dt=uq-eq (1)
式中:ud,uq分別為橋臂電壓d,q軸分量;L為Lg和Lt之和;id,iq分別為有功、無功電流分量;ed,eq分別為電網電壓d,q軸分量。
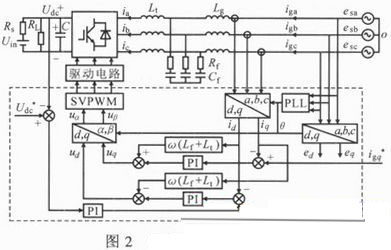
圖2示出系統的控制框圖。當整流器正常工作時,將旋轉坐標系的d軸與電網電壓矢量進行同步。此時eq=0,初始條件下uq=0。假定誤差及擾動均較小,則根據式(1)可知在啟動過程中iq不會產生沖擊。因此,在單位功率因數狀態下,ed和ud是影響系統啟動沖擊的關鍵因素。
3 啟動沖擊分析
整流器啟動瞬間電壓環離散PI控制器輸入輸出關系表達為:

式中:kp2,ki2分別為電流環PI調節器比例系數和積分系數;
,id分別為有功電流給定值與反饋值;uod為電流內環輸出;ei為電流環誤差信號。假定輕載啟動,
,則id逐漸增大,ei恒為負。由式(3)可知,此階段uod為負。設電流環PI調節器輸出參考電壓矢量在d軸上投影的最大值為Umax,則ud與uod的關系為:
Udc在啟動瞬間可近似為恒定,則uod與ud成線性關系,其比例系數為
。此時ed為正常數,根據式(2)~(4),ud為負值,ud-ed的絕對值很大,id快速下降。在id從零降到
的過程中,ud的值取決于電流環PI調節器中kp2,ki2的大小關系,且保持為負值。當id=
時,ei=0,若此時ud仍未達到ed,id將繼續下降并超過
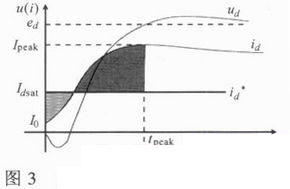
,直到ud=ed時,id達到峰值。此后ud會超過ed,根據式(1)可知,此時id開始上升,并達到
。之后,直流側電壓逐漸達到穩態,過程如圖3所示。為方便觀察,圖中有功電流及其給定均用絕對值表示。Idsat為電流環給定飽和值,I0為有功電流初始值,Ipeak為有功電流峰值。
可見,kp1,ki1對啟動沖擊影響有限,kP2,ki2對啟動沖擊具有較大影響,為簡化公式,用kp和ki替代kp2和ki2。由于采用數字控制器,故各狀態方程均為離散,列寫系統差分方程,可求得沖擊電流峰值:
4 啟動沖擊的抑制方法
圖4示出三相整流器系統框圖。其中,GPI(s)為電流環PI調節器傳遞函數,其表達式為:
GPI(s)=kp+ki/s (6)
1/(Ts+1)為采樣延遲,整流器傳遞函數為:
GPWM(s)=kPWM/(0.5Ts+1) (7)
GLCL(s)為LCL濾波器傳遞函數,由于啟動沖擊為低頻響應,LCL濾波器可等效為單L濾波器,故低頻下GLCL(s)滿足:
GLCL(s)=1/(R+LsS) (8)
式中:Ls=Lg+Lt。

啟動沖擊是由負常量ed和動態響應超調量兩部分引起的電流沖擊共同組成,故可在電流環中加入前饋量ed和第一個采樣周期的比例輸出,并引入高通濾波負反饋法來分別解決這兩部分沖擊,則此時電流環PI調節器輸出初始值為:
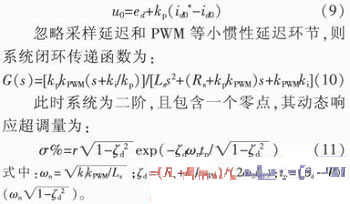
可見,kp,kPWM下降均會導致超調量上升。當系統穩定工作時,由于直流側為阻容放電回路,穩態加載時直流側電壓變化較慢,每個采樣周期電流環給定值增量較小,沖擊較低,PI參數取值范圍較寬,所以設計參數時為保證帶LCL濾波器的整流器不發生諧振并盡量降低損耗,PI調節器的kp往往取值較小。但整流器啟動時直流側電壓遠低于穩態時直流電壓,電流環給定為階躍飽和信號,且此時kPWM下降,超調量大幅上升。因此可在電流內環中加入高通濾波負反饋環節,則改進后的電流內環控制回路如圖5所示。
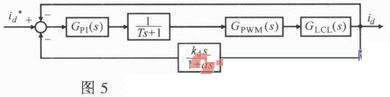
其開環、閉環傳遞函數分別為:

相對于普通的基準斜坡緩起控制方法,電網電壓初值前饋法無需進行PI參數的切換,提高了系統的穩定性和可靠性。
5 仿真和實驗驗證
基于上述分析,搭建基于Matlab/Simulink的18 kW三相整流器仿真模型,直流側額定工作電壓700 V,交流電網電壓220 V/380 V/50 Hz,交流側濾波電感分別為1.8 mH和1.2 mH,輸出濾波電容20μF,開關頻率5kHz。啟動時id動態響應如圖6a所示,調節時間約為0.03s。
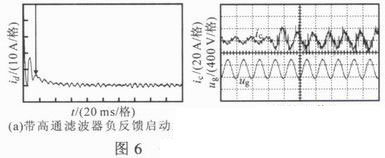
基于仿真模型搭建了一臺18 kW的三相整流器原理樣機,其相關參數與仿真模型一致。開關管選取FF75R12RT4。采用高通濾波器負反饋法啟動,并將飽和值設定為20 A,啟動時的c相進網電流ic和電網電壓‰波形如圖6b所示。可見,在整流啟動時,高通濾波器負反饋法可有效抑制啟動沖擊電流,且動態特性較好。
6 結論
研究了三相整流器的啟動沖擊,對啟動過程進行了數學建模,分析了啟動沖擊產生的原因并給出了估算啟動沖擊電流大小的計算方法。在此基礎上,針對啟動沖擊產生的兩個要素提出了電流高通濾波負反饋軟啟動法,分析了其啟動性能,并研制了一臺18 kW的三相整流器原理樣機。仿真和實驗表明,高通濾波負反饋法簡單有效,動態響應速快,可實現快速無沖擊啟動。





